Hi,
I’m using nuitrack with RealSense D455. When tracking a joint of the person with nuitrack I get very high depth values (over 1000) but when I manually get the point in the view and the depth value corresponding to that point I only get values around 100.
Is there something I need to configure for it to be the same?
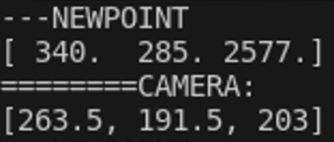
(Don’t mind the x and y values, I did not pick the exact same point, but it doesn’t matter, since the whole mapping seems to be off)
Hi @sassmannc,
but when I manually get the point in the view and the depth value corresponding to that point I only get values around 100.
Could you please describe how exactly you get the depth value of the point manually?
I did not pick the exact same point, but it doesn’t matter, since the whole mapping seems to be off
-
Since it’s not exactly the same point, you may have selected a point that really has that value (100).
-
The manually selected point could fall into the noise pixel/incorrect depth value (Nuitrack’s skeleton points are noise robust).
Hi @sassmannc,
How are you? Has your issue been solved?
Would be great if you could provide some reply/feedback, we will be ready to help.
Thanks.