Hi Westa,
was travelling and had no time until now to look into it.
This is the section for the realsense in nuitrack.config:
"Realsense2Module": {
"Depth": {
"ProcessMaxDepth": 5000,
"RawWidth" : 848,
"RawHeight" : 480,
"ProcessWidth": 848,
"ProcessHeight": 480,
"FPS": 90,
"Preset": 5,
"PostProcessing": {
"SpatialFilter": {
"spatial_iter": 0,
"spatial_alpha": 0.5,
"spatial_delta": 20
},
"DownsampleFactor": 1
},
"LaserPower": 1.0
},
"FileRecord": "",
"Depth2ColorRegistration": true,
"RGB": {
"RawWidth" : 1920,
"RawHeight" : 1080,
"ProcessWidth": 1920,
"ProcessHeight": 1080
}
},
so I assume that my raw and processed dimesions are the same with 848x480.
848x480 = 407 040 points
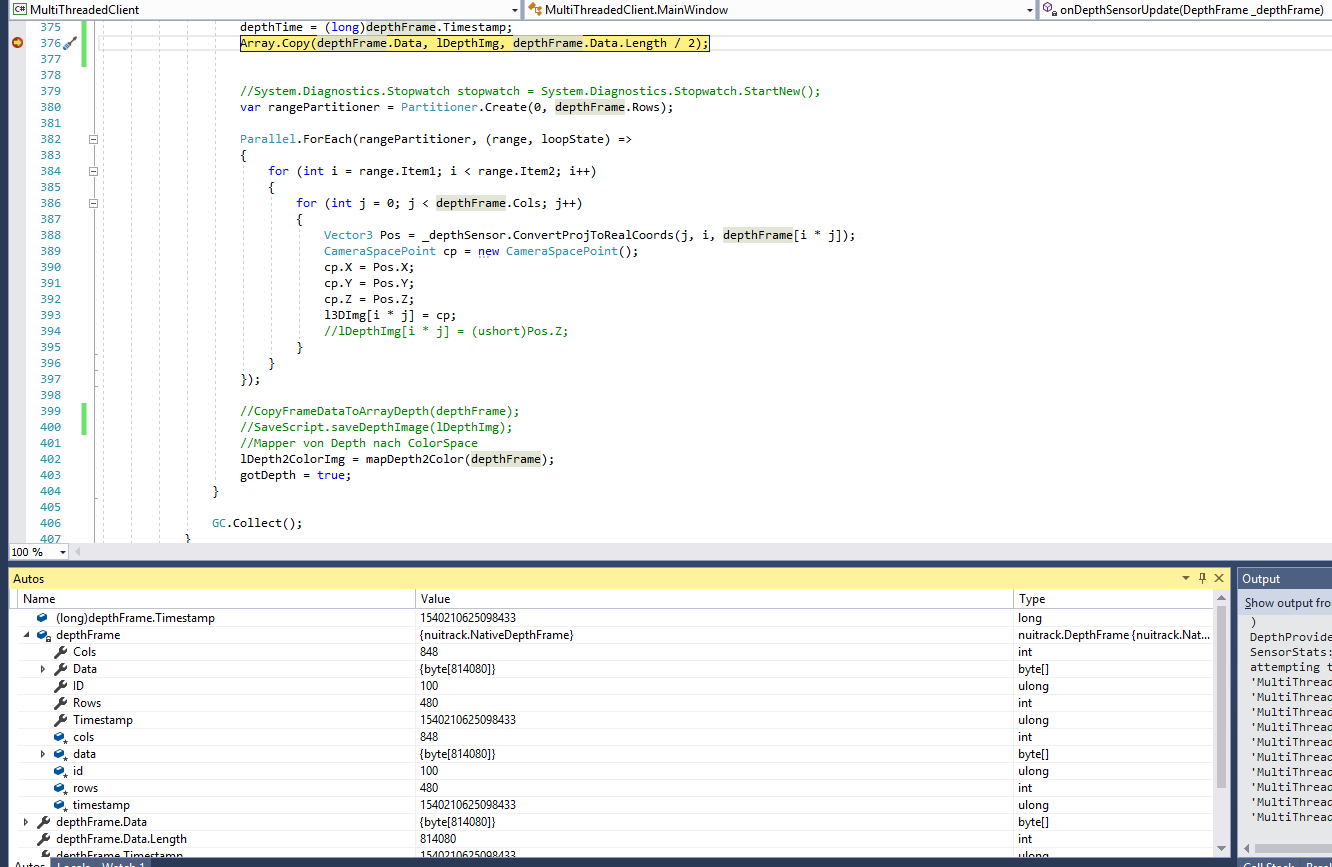
Now in my Code I copy the data from depthframe into a new array, but the depthframe.data array is twice as long as expected -> 814080 points (see screenshot).
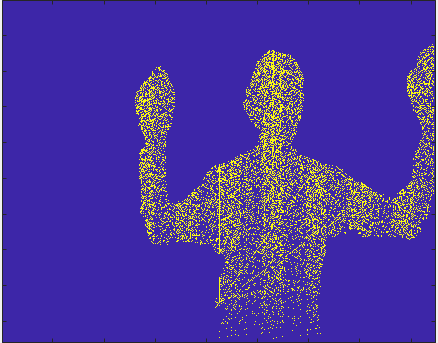
If I take only the first half of this data array and save it as a Picture I get the results from the previous post.
Data Copy:
//create new byte array
private ushort[] lDepthImg = new ushort[848x480];
private void onDepthSensorUpdate(DepthFrame _depthFrame)
{
// DepthStream
if (true)
{
depthFrame = _depthFrame;
if (depthFrame != null)
{
depthTime = (long)depthFrame.Timestamp;
//Copy data to new array
CopyFrameDataToArrayDepth(depthFrame);
//Save a Picture
SaveScript.saveDepthImage(lDepthImg);
}
}
}
void CopyFrameDataToArrayDepth(DepthFrame frame)
{
//fast and efficient way to copy the data
var rangePartitioner = Partitioner.Create(0, depthFrame.Rows);
Parallel.ForEach(rangePartitioner, (range, loopState) =>
{
for (int i = range.Item1; i < range.Item2; i++)
{
for (int j = 0; j < frame.Cols; j++)
{
lDepthImg[i * j] = frame[i * j];
}
}
});
}
save as Picture:
public static void saveDepthImage(ushort[] depthValues)
{
byte[] tranformedDepthImage = TransformDepthImageArray(depthValues, imageType.depthImage);
saveImage(Environment.GetFolderPath(Environment.SpecialFolder.MyPictures) + @"\RealsenseTest
\depthImage" + savedImagesCounter + ".png", tranformedDepthImage, depthImageWidth,
depthImageHeight, imageType.depthImage);
savedImagesCounter++;
}
private static byte[] TransformDepthImageArray(ushort[] rawData, imageType imageType)
{
byte[] result = new byte[depthImageHeight * depthImageWidth * 4];
int currentIndex = 0;
foreach (int depth in rawData)
{
byte color = (byte)(depth * 255 / 5000);
result[currentIndex++] = (byte)(255 * color) ;
result[currentIndex++] = (byte)(255 * color);
result[currentIndex++] = 0;
result[currentIndex++] = 255;
}
return result;
}
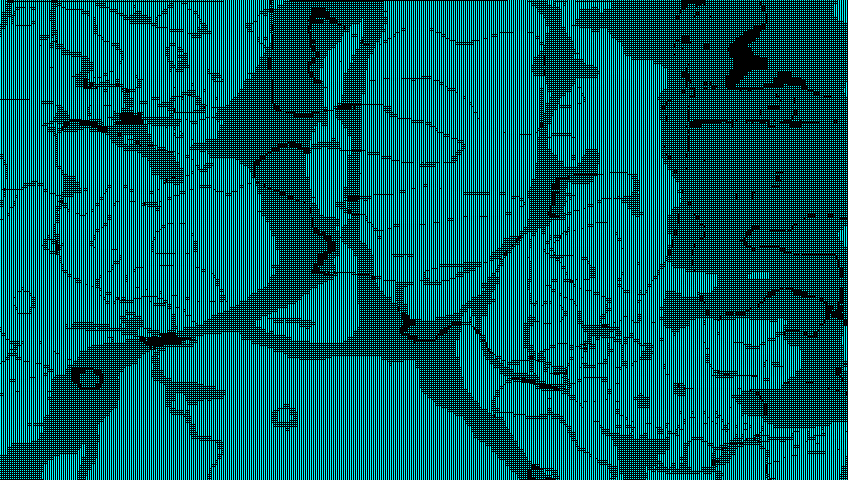
I also tried another approach where I use Array.Copy
// Divided by 2 because of double length of depthFrame.Data array
Array.Copy(depthFrame.Data, lDepthImg, depthFrame.Data.Length / 2);
but then I get something like this:
Thanks for looking into this.
Best,
Björn