Hi !
I’m working with Kinect2 and want to extract depth image with Nuitrack. Everything works fine but I notice that my frame size is incorrect. In the callback NuitrackSkeleton::onNewDepthFrame(DepthFrame::Ptr frame), I have :
frame->getCols() = 640
frame->getRows() = 480
But the depth resolution of Kinect2 is supposed to be 512×424. I don’t understand why I dont obtain the real resolution of Kinect2. Moreover, in the configuration file I have :
“KinectV2”: {
“Color”: {
“RawHeight”: 1080,
“RawWidth”: 1920
},
“Depth”: {
“RawHeight”: 424,
“RawWidth”: 512
}
},
It seems that I should obtain the resolution I expected from Kinect2.
Depth data are resized/filtered before we can access it ? Do I have to change something else in the configuration file ?
Thanks,
Jel
We noticed this too, and we’re interested to know if there’s a reason for the resolution change.
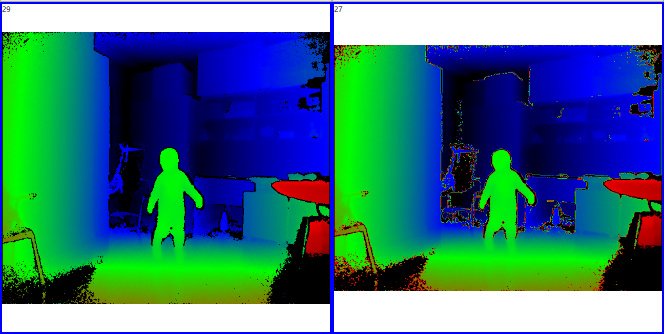
Also, we’ve noticed that nuitrack has some artifacts at the boundaries where there’s no data. Here’s a screenshot capture using kinect SDK and Nuitrack, side by side, with false color:
1 Like
@jel.cos
Indeed, depth frame resolution is resized to 640x480 for further processing by Nuitrack. You don’t have to change anything in nuitrack.config because Nuitrack processes the depth frame in this resolution (640x480).
@vpenades
Nuitrack uses the OpenNI2 driver for OpenNI-compatible cameras (including Kinect), which causes noise as shown in your screenshot.
@olga.kuzminykh Thank you for your reply. So if I understand well, there is no way with Nuitrack to obtain the raw depth image in 512x424… ?
Unfortunately, raw depth frame resolution in the current Nuitrack version can be only 640x480
1 Like