The main reference frame of NuiTrack SDK seems to have an unusual convention.
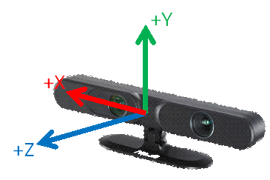
Its X-axis point to the right side of the camera.
Its Y-axis point upward.
Its Z-axis point away from the camera in frontal direction.
Z-axis is the opposite of the cross product (X-axis x Y-axis) according to the right-hand rule.
Does it mean that NuiTrack use the left-handed coordinate system? And why?