I am trying to run a ROS node “nuitrack_body_tracker” as found on this repository.
Compilation goes without any errors.
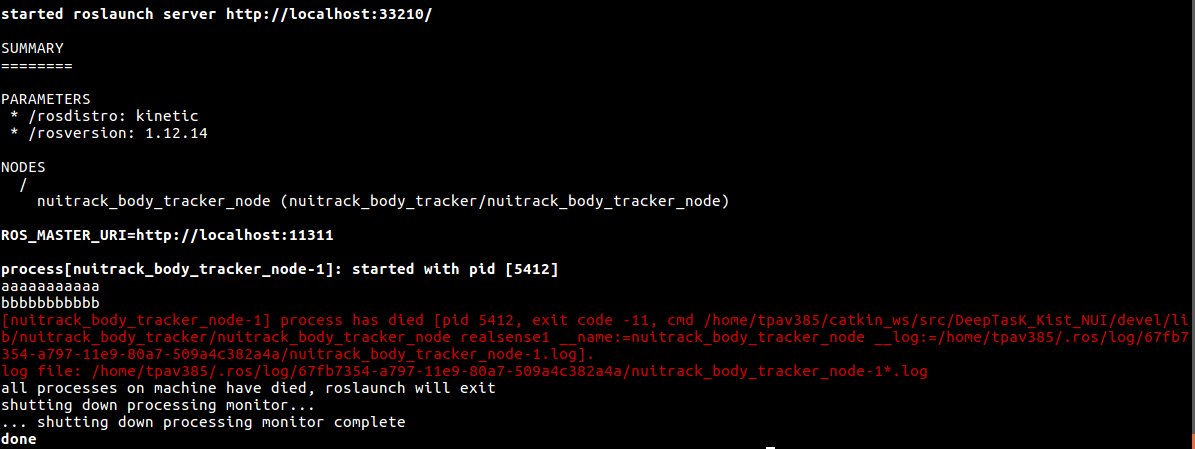
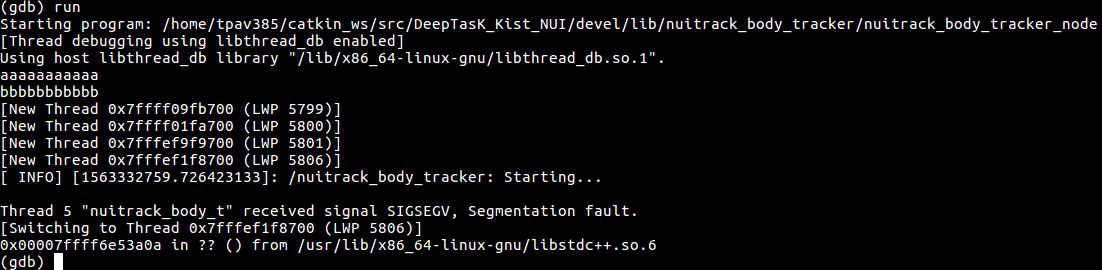
Shortly after launch, the process dies with exit code -11 (a segmentation fault) as seen in this image:
I have a working nuitrack trial license, and I am able to run nuitrack_sample with a 3 minute time limit.
I am using an Intel Realsense D435 camera, with a USB 3.0 connection.
Does anyone have any suggestions for how to solve this, or experience with similar issues?
I am using a PC with Ubuntu 16.04 and ROS Kinetic.
OpenNI utils arent installed but OpenNI2 utils were, however removing them did not change the situation.
I am not sure how to find the list of dynamic dependencies.
I have just been given an older NuitrackSDK (1.3.5) and installation .deb (0.23) that seem to have fixed the problem completely. I have also tried it with 1.3.8 and 0.23, this works successfully as well, and my colleagues say 1.3.10 works too.
Hi Olga,
I had the same question. I am sure that I installed the Nuitrack 0.28.0 with SDK 1.4.0 but it can’t work.I also move the libSenDuck.so to up one level but it can’t work too.
If I switch the 0.23 and 1.3.5, the program works fine but my online license (nuitrack pro) can not use.
Is there any other solutions?
Thanks.
I have set up a new computer with the up to date Nuitrack files (SDK 1.4.0 and deb 0.28) and tried moving the file that you suggested however I still get the same exact problem.