I am using two Intel realsense D435i sensors.
I am using nuitrack_multisensor_sample as a reference.
I am trying to make a program to get the coordinates of the joints from the first and second sensor respectively to compensate for the hidden and invisible joints.
I have added the code to get the coordinates, but I am having trouble figuring out which camera the data was acquired from.
Here is a part of the code
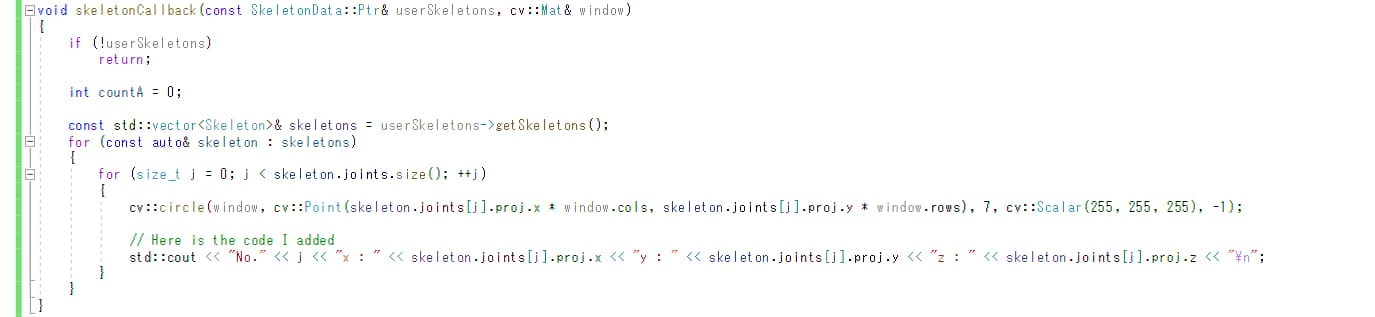
Here is a diagram of the camera and the person’s position
Thank you very much.