Hi,
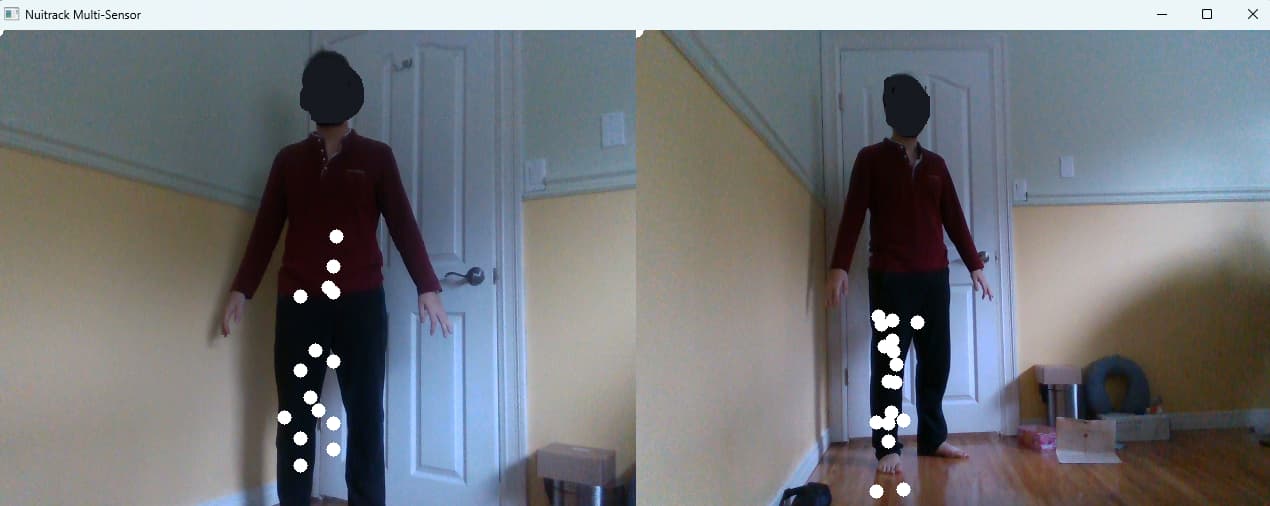
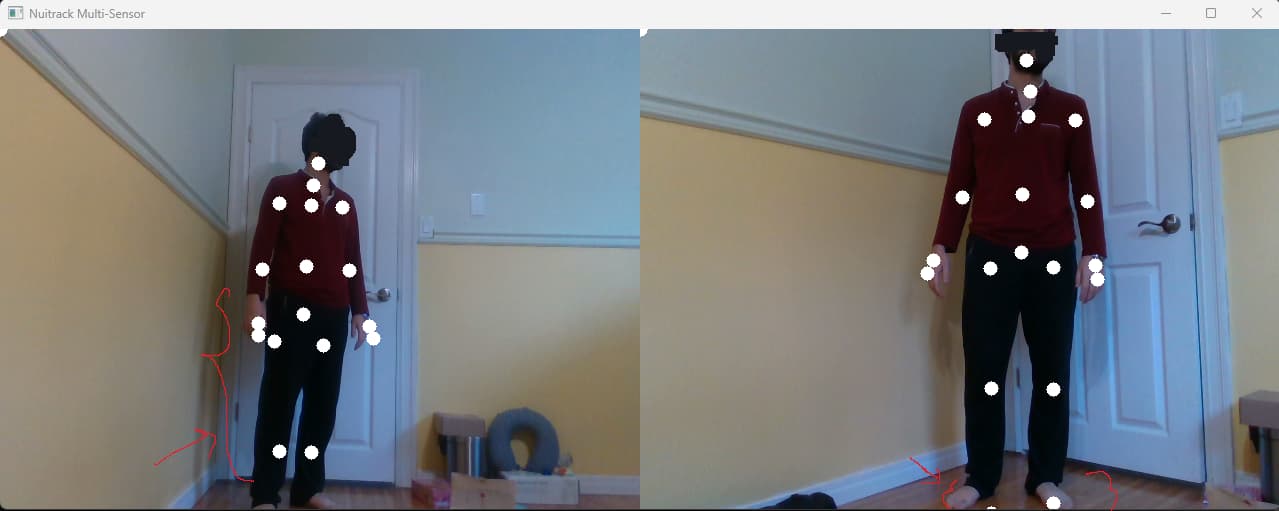
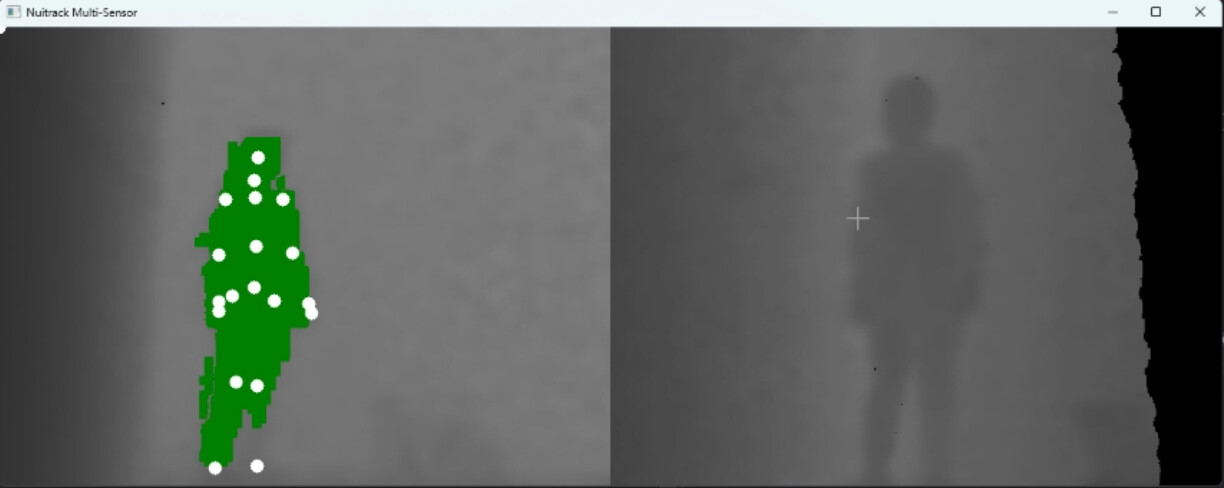
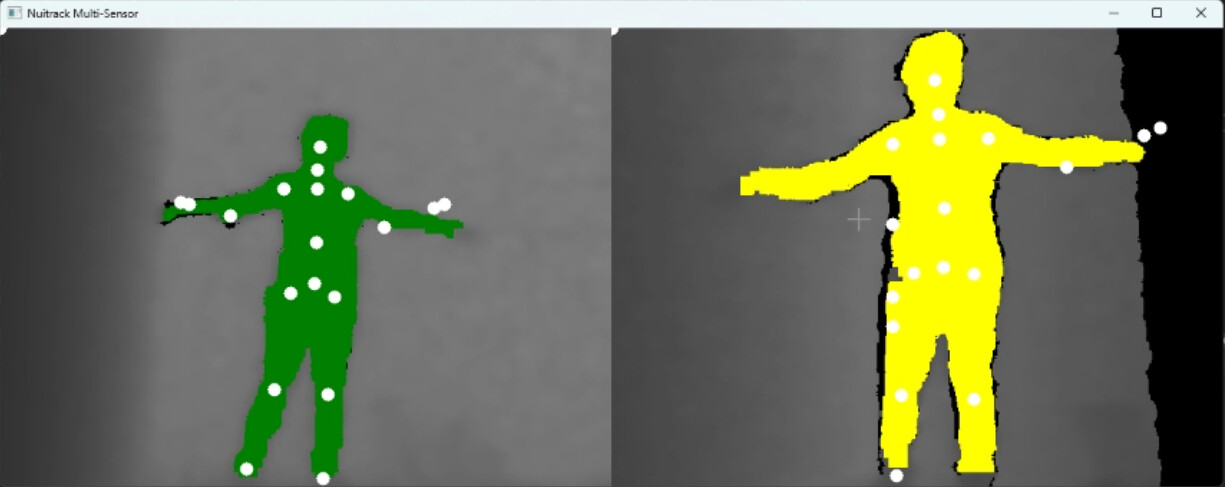
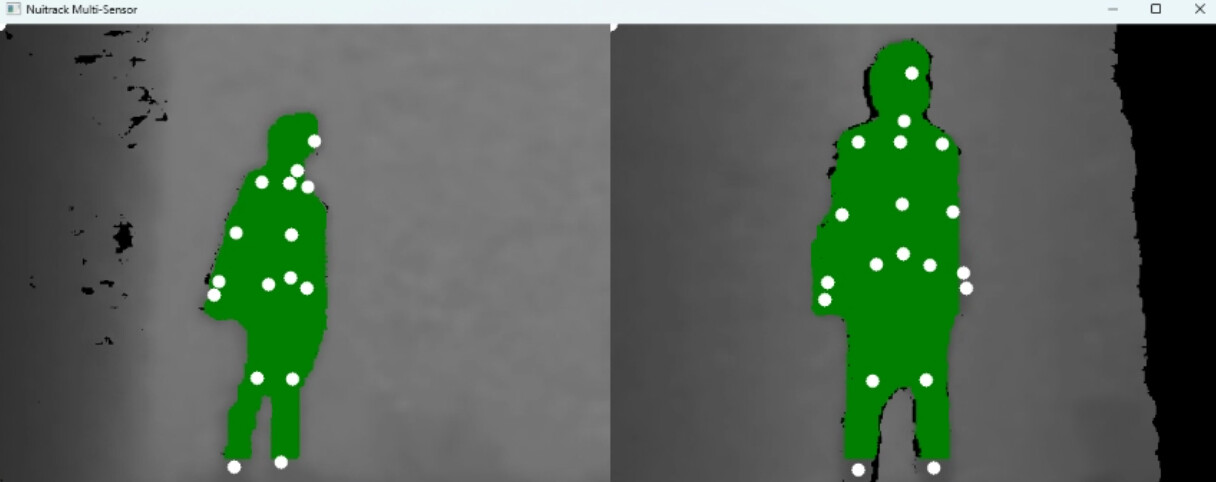
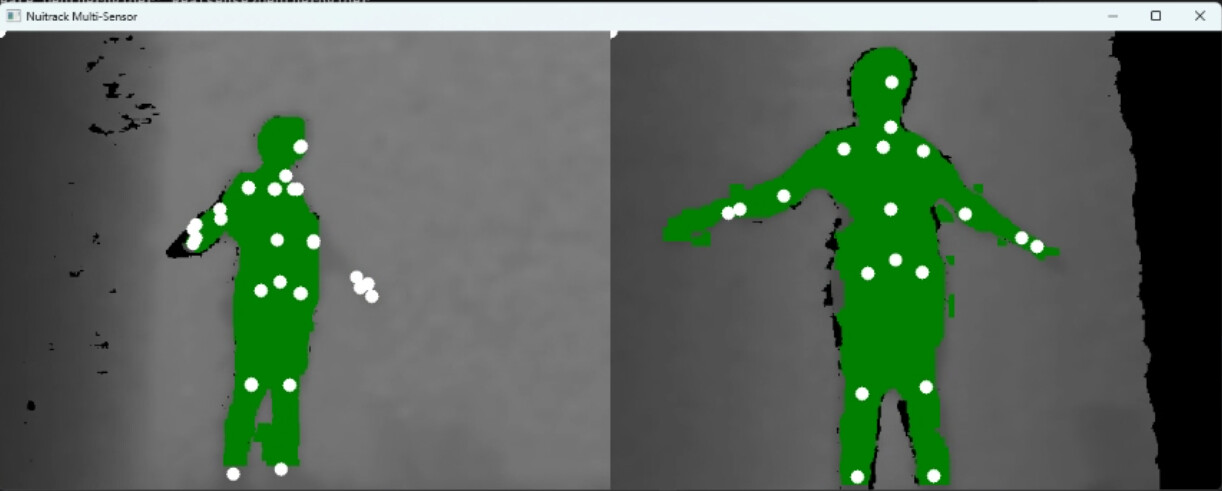
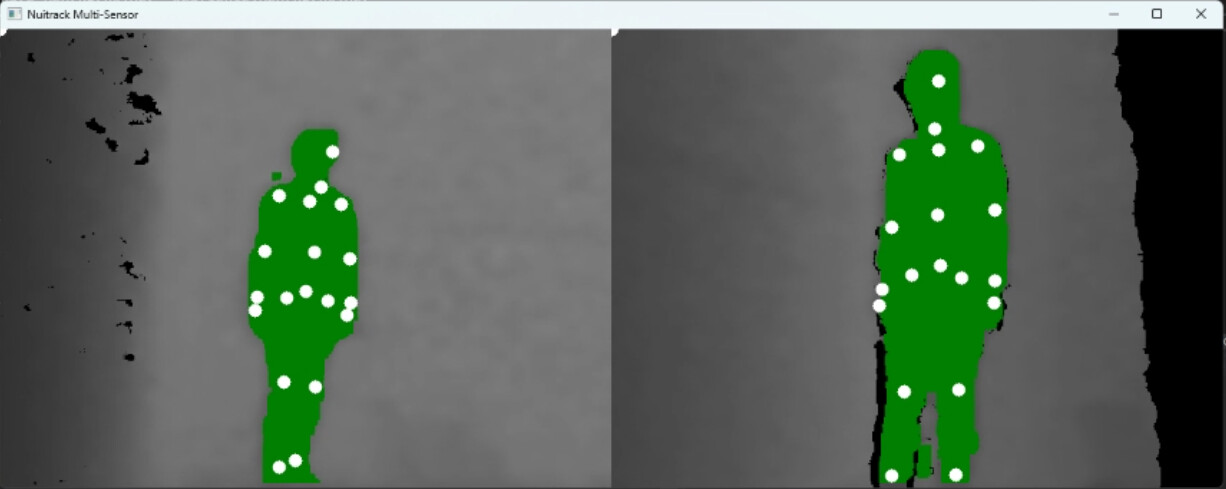
When I run the multiple sensor example, I get these messages in the terminal, which means some parts fail. I would be very thankful if you could help in fixing them.
Thanks
[ INFO:0@0.069] global c:\build\master_winpack-build-win64-vc15\opencv\modules\highgui\src\registry.impl.hpp (114) cv::highgui_backend::UIBackendRegistry::UIBackendRegistry UI: Enabled backends(4, sorted by priority): GTK(1000); GTK3(990); GTK2(980); WIN32(970) + BUILTIN(WIN32UI)
[ INFO:0@0.071] global c:\build\master_winpack-build-win64-vc15\opencv\modules\core\src\utils\plugin_loader.impl.hpp (67) cv::plugin::impl::DynamicLib::libraryLoad load D:\opencv\build\x64\vc15\bin\opencv_highgui_gtk460_64.dll => FAILED
[ INFO:0@0.073] global c:\build\master_winpack-build-win64-vc15\opencv\modules\core\src\utils\plugin_loader.impl.hpp (67) cv::plugin::impl::DynamicLib::libraryLoad load opencv_highgui_gtk460_64.dll => FAILED
[ INFO:0@0.073] global c:\build\master_winpack-build-win64-vc15\opencv\modules\core\src\utils\plugin_loader.impl.hpp (67) cv::plugin::impl::DynamicLib::libraryLoad load D:\opencv\build\x64\vc15\bin\opencv_highgui_gtk3460_64.dll => FAILED
[ INFO:0@0.073] global c:\build\master_winpack-build-win64-vc15\opencv\modules\core\src\utils\plugin_loader.impl.hpp (67) cv::plugin::impl::DynamicLib::libraryLoad load opencv_highgui_gtk3460_64.dll => FAILED
[ INFO:0@0.074] global c:\build\master_winpack-build-win64-vc15\opencv\modules\core\src\utils\plugin_loader.impl.hpp (67) cv::plugin::impl::DynamicLib::libraryLoad load D:\opencv\build\x64\vc15\bin\opencv_highgui_gtk2460_64.dll => FAILED
[ INFO:0@0.074] global c:\build\master_winpack-build-win64-vc15\opencv\modules\core\src\utils\plugin_loader.impl.hpp (67) cv::plugin::impl::DynamicLib::libraryLoad load opencv_highgui_gtk2460_64.dll => FAILED
[ INFO:0@0.074] global c:\build\master_winpack-build-win64-vc15\opencv\modules\highgui\src\backend.cpp (90) cv::highgui_backend::createUIBackend UI: using backend: WIN32 (priority=970)
[ INFO:0@0.074] global c:\build\master_winpack-build-win64-vc15\opencv\modules\highgui\src\window_w32.cpp (3013) cv::impl::Win32BackendUI::createWindow OpenCV/UI: Creating Win32UI window: Nuitrack Multi-Sensor (1)
Create DepthProvider: Realsense2DepthProvider
Create DepthProvider: Realsense2DepthProvider
[ INFO:0@10.894] global c:\build\master_winpack-build-win64-vc15\opencv\modules\core\src\parallel\registry_parallel.impl.hpp (96) cv::parallel::ParallelBackendRegistry::ParallelBackendRegistry core(parallel): Enabled backends(3, sorted by priority): ONETBB(1000); TBB(990); OPENMP(980)
[ INFO:0@10.895] global c:\build\master_winpack-build-win64-vc15\opencv\modules\core\src\utils\plugin_loader.impl.hpp (67) cv::plugin::impl::DynamicLib::libraryLoad load D:\opencv\build\x64\vc15\bin\opencv_core_parallel_onetbb460_64d.dll => FAILED
[ INFO:0@10.895] global c:\build\master_winpack-build-win64-vc15\opencv\modules\core\src\utils\plugin_loader.impl.hpp (67) cv::plugin::impl::DynamicLib::libraryLoad load opencv_core_parallel_onetbb460_64d.dll => FAILED
[ INFO:0@10.895] global c:\build\master_winpack-build-win64-vc15\opencv\modules\core\src\utils\plugin_loader.impl.hpp (67) cv::plugin::impl::DynamicLib::libraryLoad load D:\opencv\build\x64\vc15\bin\opencv_core_parallel_tbb460_64d.dll => FAILED
[ INFO:0@10.896] global c:\build\master_winpack-build-win64-vc15\opencv\modules\core\src\utils\plugin_loader.impl.hpp (67) cv::plugin::impl::DynamicLib::libraryLoad load opencv_core_parallel_tbb460_64d.dll => FAILED
[ INFO:0@10.896] global c:\build\master_winpack-build-win64-vc15\opencv\modules\core\src\utils\plugin_loader.impl.hpp (67) cv::plugin::impl::DynamicLib::libraryLoad load D:\opencv\build\x64\vc15\bin\opencv_core_parallel_openmp460_64d.dll => FAILED
[ INFO:0@10.896] global c:\build\master_winpack-build-win64-vc15\opencv\modules\core\src\utils\plugin_loader.impl.hpp (67) cv::plugin::impl::DynamicLib::libraryLoad load opencv_core_parallel_openmp460_64d.dll => FAILED