I am working on a project with nuitrack and I noticed when I make a T pose my tracking does weird things. I wanted to see what was going on so I started the c++ sample. This is what came out.
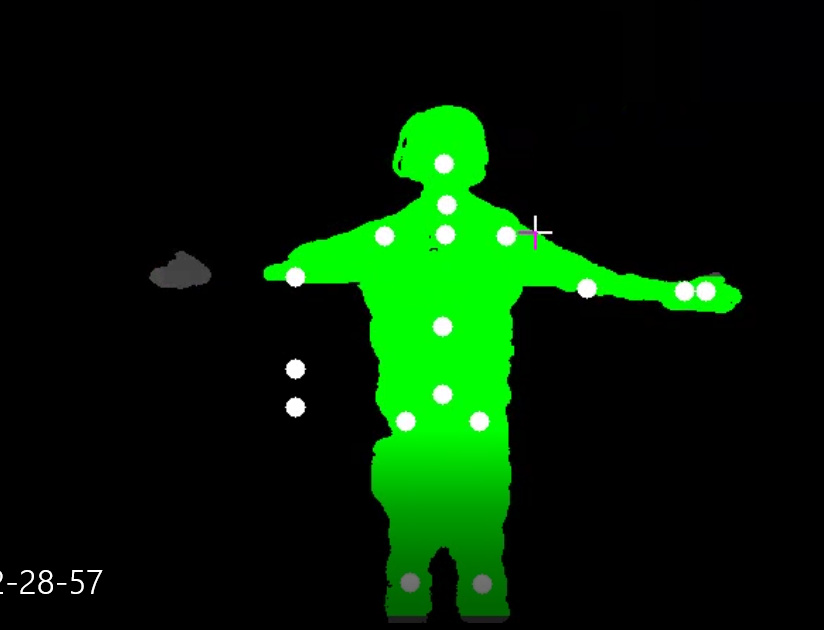
When I am at around 1.8 meters from the camera it doesn’t see my arm.
If i step forward to a round 1.5 meters it just works normally.
Is there something i can tweak in the nuitrack.config to fix this.
I am using the latest nuitrack SDK and an Intel real-sense D435
Thanks in advance