I am using two Intel realsense D435i sensors.
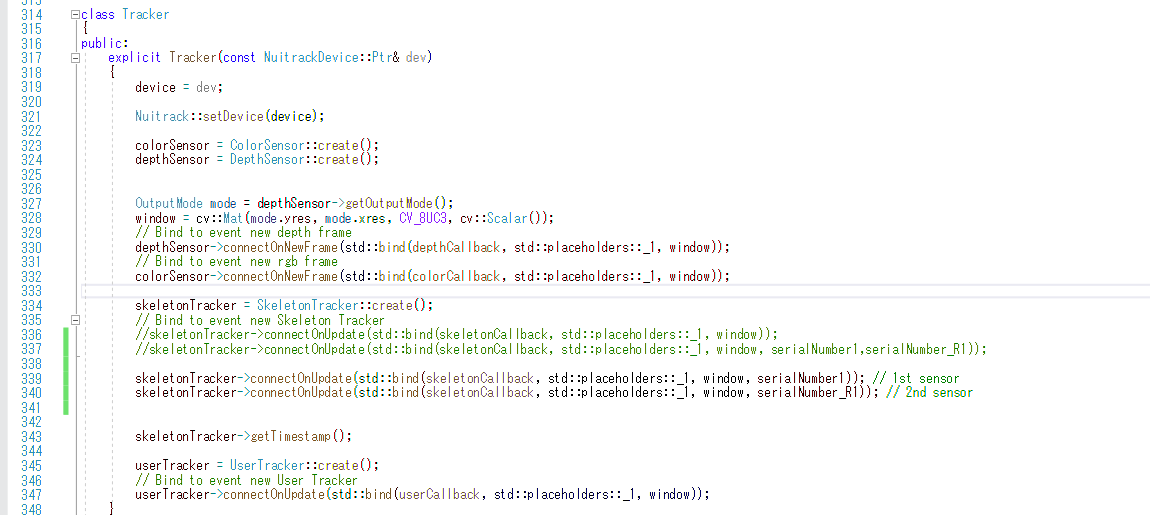
The code in nuitrack_multisensor_sample is used as a reference.
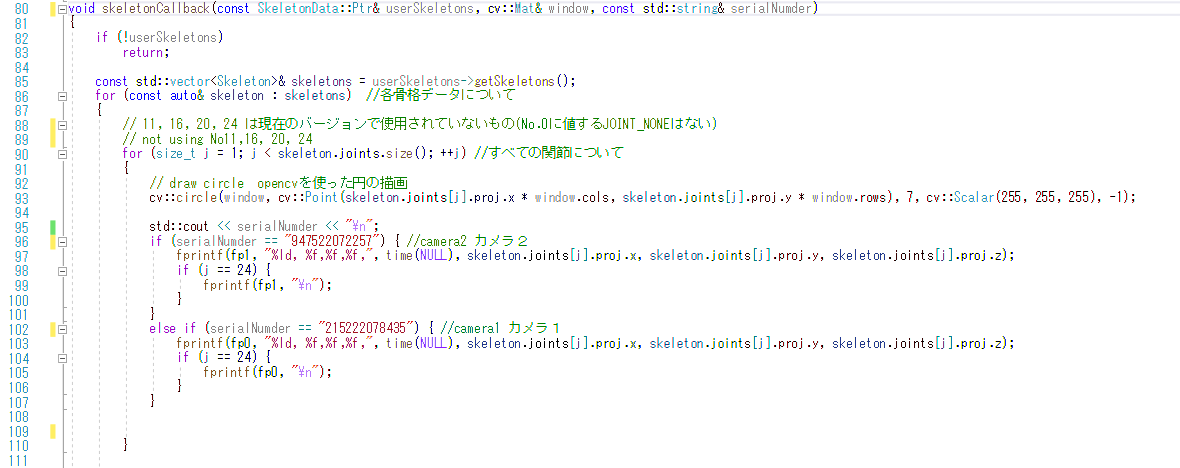
I am trying to make a program to get the coordinates of the joints from the first and second sensor respectively to compensate for the hidden and invisible joints.
I was getting the same coordinates from the first and second camera, even though I was getting the coordinates of the joints from two cameras in different locations.
Shouldn’t the coordinates of the joints be different if the cameras are placed in different locations?
At the moment, several sensors in Nuitrack work simply as separate sensors.
The case that you describe requires calibration of cameras (to determine the location of cameras relative to each other) and a special mode of operation of cameras (cameras serve a single space and complement and form an extended FOV).
At the moment, the Nuitrack team is developing such a mode of operation.