Hi everybody!
Now I’m working on unity 5.5.0p4 and Xtion 2.
But this sample runs good with Intel D435.
pls recommend me the best combination Xtion Driver and Nuitrack sdk
Thanks.
Hi everybody!
Now I’m working on unity 5.5.0p4 and Xtion 2.
Hi Lewandowski,
Please advise what Unity project are you trying to run?
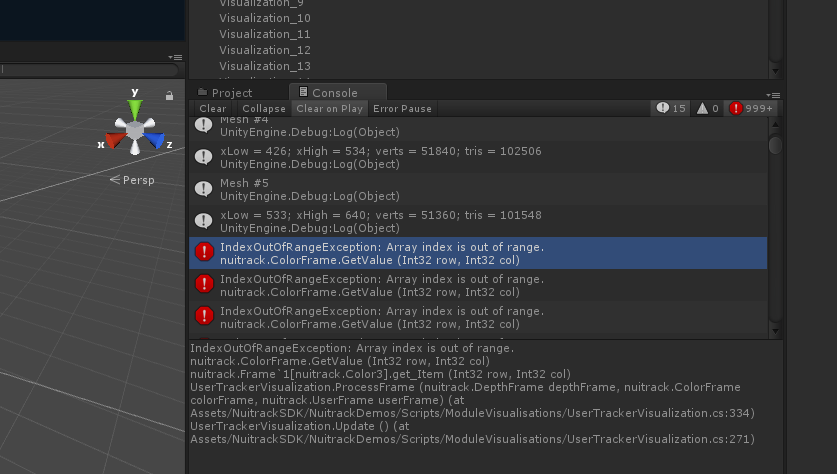
Try to:
[Image]
Resolution=1
Thanks, olga.kuzminykh!
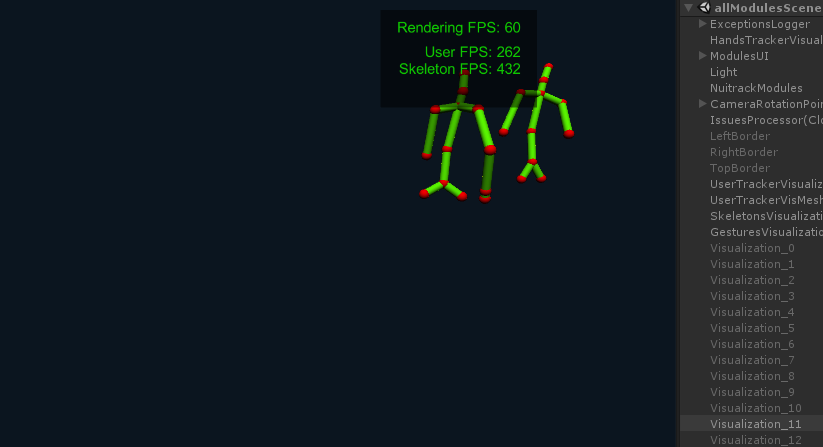
I have fixed this errors. but I can’t get skeleton info like this image yet.
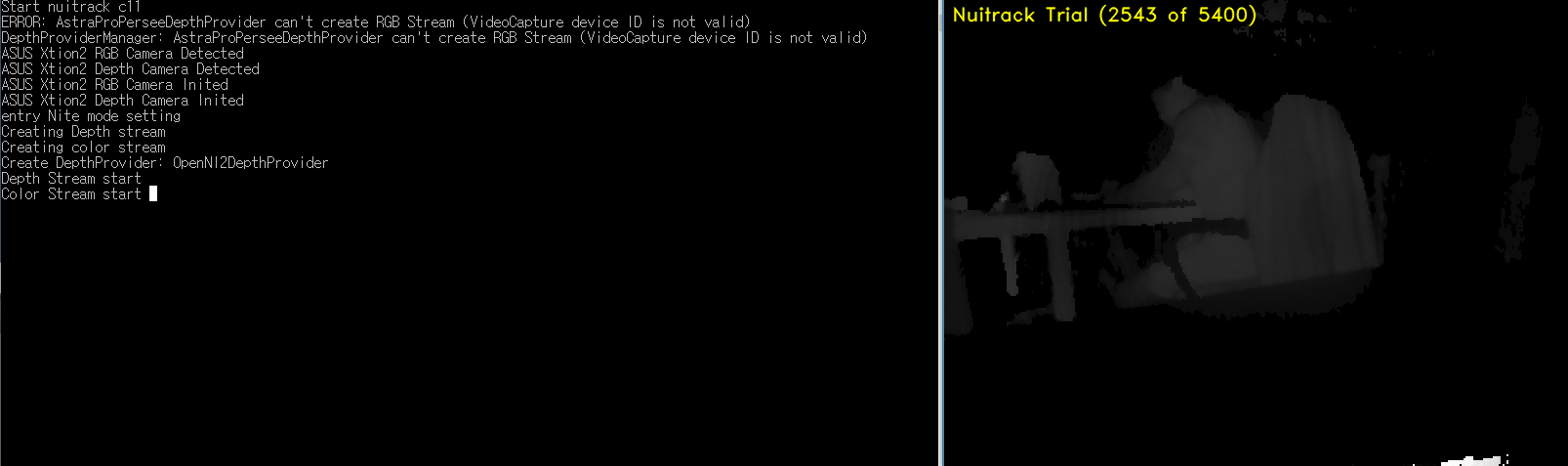
Please unplug all the connected sensors, connect ASUS Xtion2 and try to run nuitrack_c11_sample.exe. Run this sample in Windows PowerShell and provide us with the console output.
P.S.: check your “Spam” folder, it seems that you haven’t received the emails sent from support-nuitrack@3divi.com
Thanks olga.kuzminykh!
I have connected only Xtion 2 Camera. And here is nuitrack_c11_sample.exe screenshot.
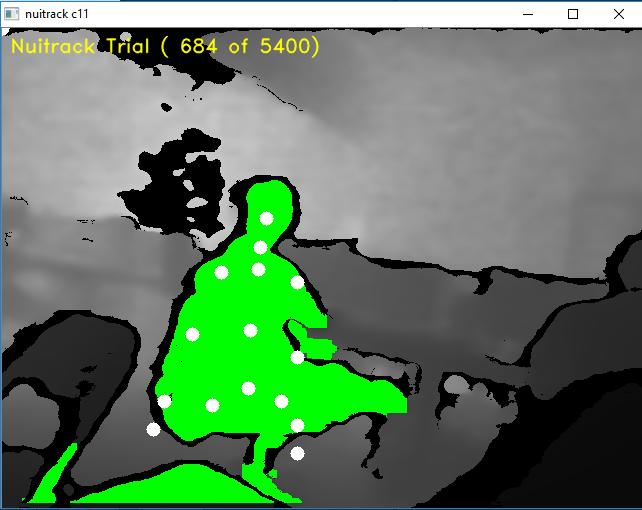
It seems that the sample works fine. The skeletons are detected when certain conditions for placing the sensor and user-to-sensor distance are satisfied:
BAD placement:
GOOD placement:
Thanks your message olga!
I did it.
One problem, This Xtion 2 's skeleton info is not correct than Intel Realsense D435.
What camera do you suggest to get best skeleton info.
Indeed I already finished project with D435 but this project needs responsive skeleton info like analysis sport action. So I changed Xtion 2 instead of D435. But result is worse than when I’m using D435.
Is this camera problem or nuitrack’s restriction?
Thanks!
HI,
FWIW on our assessments the D435 is not the ideal sensor for skeletal type tracking - its error falloff over any distance beyond around 50cm increases too rapidly.
To get a good reliable skeletal track you need repeatable depth data - in other words - if you stand in one position you always get the same depth information. With the D435 at distances beyond 1.5m there is a statistical probability that the reported depth data will be different from frame to frame for any give point due to the increased error response. The D435 is really optimised for much closer ranges.
The D415 may be better suited - but that really depends on your space needs. It works better at longer distances - has close to 2x the accuracy/reliablity at the same 1.5m - and scales out better to around 3.0m. Though it does have a rolling shutter - which makes it not ideal for moving platforms.
In comparison the Xtion2 is not even in the same market place as INTEL - its basically the same sensor tech as the orbbec (640x480) mono infrared structured light - which are all really just knockoffs of the original primesense devices from 2013.
All these mono structured light sensors come with the same sorts of issues - the depth data is - well lets just call it what it really is - a guestimate. The sensors cant see around corners and cant see behind objects which results in depth holes and other issues that cause the tracking systems to report false negatives.
The original Kinect was in this same boat - and even worse so as it hard a even lower resolution sensor.
For Nuitrack - they are only able to work with the data they are given - and when that data has errors from frame to frame - that can propogate quickly into the skeleton tracking.
This is most noticeably the case when the hands are out in front of the body - when the sdk has no idea what is an hand/wrist/elbow or shoulder.
The intel sensors - on paper should be superior to the primesense based technologies as they utilise stereo sensor tech instead of mono tech - and are higher resolution. But it then come down to how they are tuned - and for now the D435 is not tuned for skeletal work it seems.
The other issue we have these days it that everyone has the Kinect 2 as a reference set - which is in many ways an unfair comparison - the kinect 2 was NOT a structured light sensor - but instead a Time Of Flight based system - which led to it being significantly more accurate in its guestimates.
Westa