Hey i’m trying to set RGB to a larger resolution than 640x480 with no success. Unity 3D with nuitrack license newsest sdk’s and firmwares.
A working config for the device would be nice
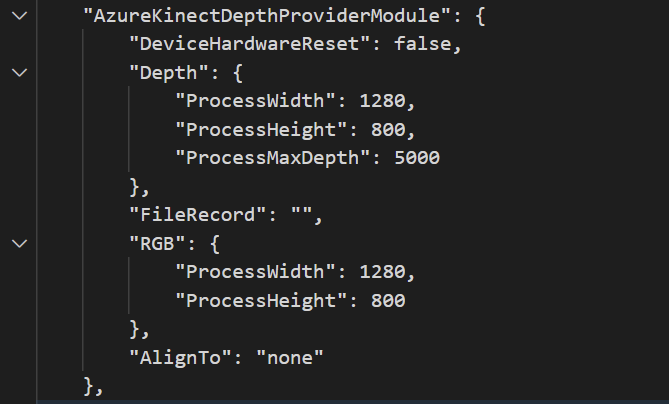
sensor In nuitrack program: Azure Kinect DK(AzureKinectDepthProvider)
on a side note my Realsense D455 config is working perfectly, I can adjust the values
Any other way of changing the width and height from c# unity would also work for me.
Thank you really much <3
this worked, if you dont mind to tell me on how to also depth setting for this it would be great.
I will check out the “nuitrack_device_api_sample” hope I will get answers from there (like a full list of settings for config i can apply, depth, color, rotation, framerate, etc. )
And im pretty sure that mirror mode isnt working on Nuitrack Manager unity for the Azure kinect DK device
If you want to change the FPS add to the config: "FPS": 30, // 30, 15 or 5. If other value is set -> resets to default 30 or 15
To change source color resolution add to the config: "ColorResolution": "1536P" // suffixes of k4a_color_resolution_t enum // if invalid suffix -> resets to 1536P.
To change source depth resolution add the config: "DepthMode": "WFOV_2X2BINNED", // suffixes of k4a_depth_mode_t enum // if invalid suffix -> resets to WFOV_2X2BINNED
At the moment, Rotate and Mirror is not supported for the Azure DK sensor. Sorry for inconvenience.