Hi, I work with the RealSense D435 sensor, Nuitrack, and Unity.
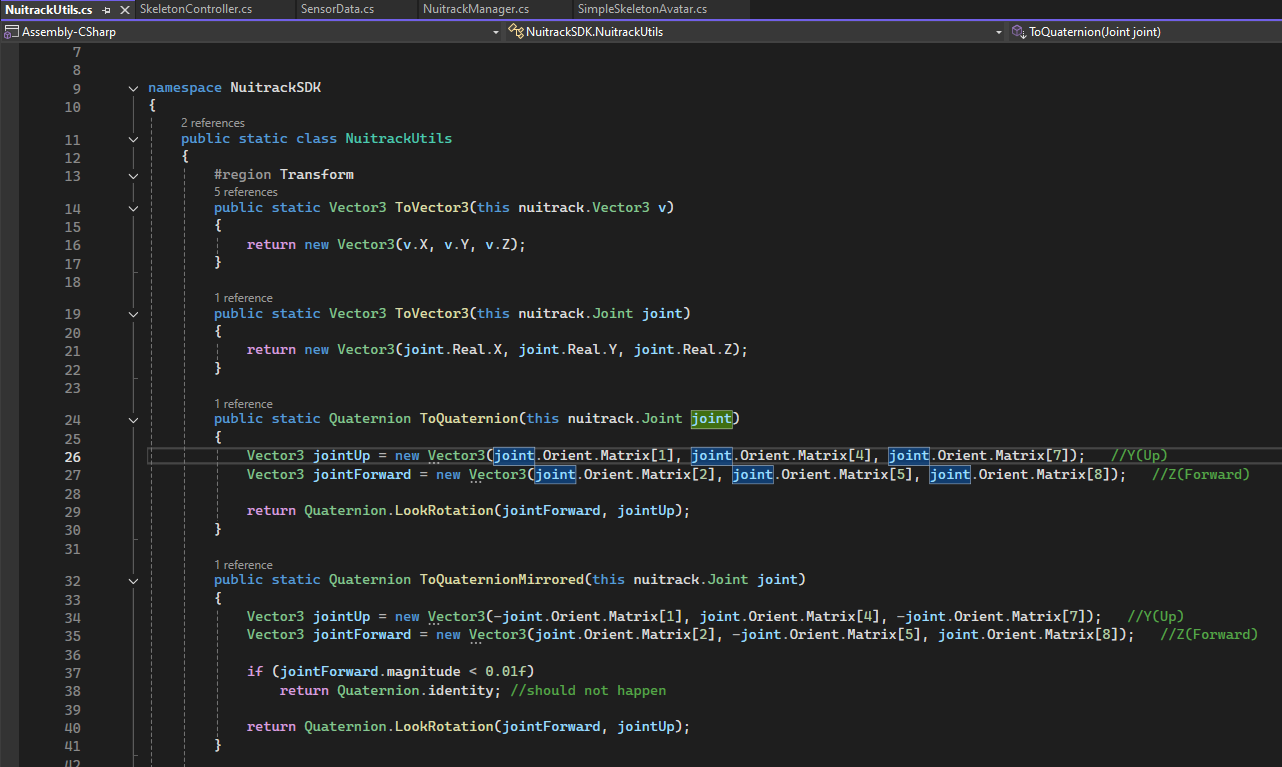
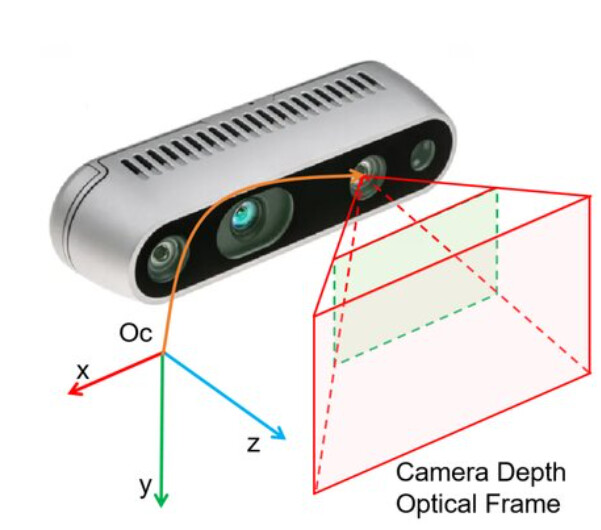
I know that the sensor coordinate system is right-handed and the Unity coordinate system is left-handed. But the difference is not just about one axis, all three axes have different directions in the two systems. I am wondering how Nuitrack solves this problem and converts coordinate systems, as well as global joints and local joints from the sensor coordinate system to the Unity coordinate system.
Thank you for your answer. Now my question is about the coordinate system conversion between the sensor and Nuitrack.
In the post you replied to, the sensor in the picture has a left-handed coordinate system, while the sensor I work with, D435, has a right-handed coordinate system.
So my question is: does Nuitrack use the sensor’s right-handed coordinate system and convert it to left-handed when visualizing joints in Unity, or does Nuitrack use its own coordinate system that is independent of the sensor’s coordinate frame?