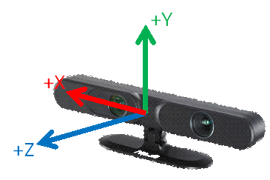
By default, the origin of coordinates coincides with the position of the depth sensor (given that registration of depth frames and color frames is turned off). Coordinate axes are directed as shown in the image. This system is used by default in the OpenNI framework.
1 Like