Hello guys,
I was wondering if someone can help me to figure out what are the best settings for nuitrack.config I’ve already read there is no documentation for this file, and I’ve been checking different post about the same and everypost is kind of suggesting different things, so what I’d like to do is having this post as a nice reference for other users as well.
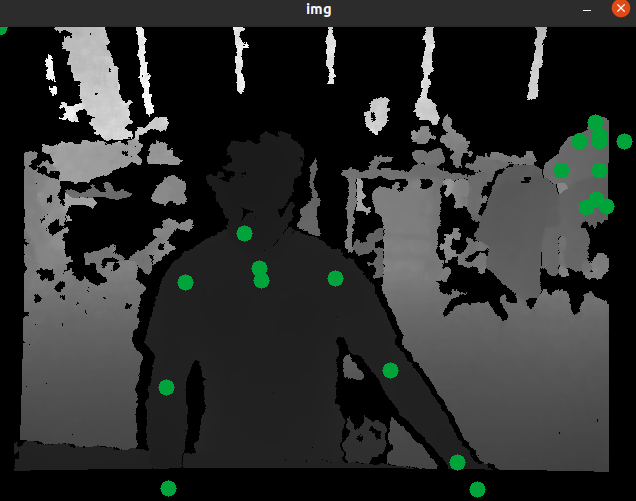
I am doing skeleton and face tracking with Intel D415.
`"Realsense2Module": {
"Depth": {
"ProcessMaxDepth": 5000,
"ProcessWidth": 640,
"ProcessHeight": 480,
"FPS":60,
"RawWidth": 848,
"RawHeight": 480,
"Preset": 5,
"PostProcessing": {
"SpatialFilter": {
"spatial_iter": 0,
"spatial_alpha": 0.5,
"spatial_delta": 20
},
"DownsampleFactor": 1
},
"LaserPower": 1.0
},
"FileRecord": "",
"RGB": {
"ProcessWidth": 640,
"ProcessHeight": 480
}
}`
- I am not using RGB camera, just using the depth to perform the tracking, is the RGB value needed there?
Help will be very much appreciated - “Preset”: 5, can this be changed? is that the same as RealSenseViewer? Preset 5 means HightDensity, MediumDensity?
Also I am trying to track only 1 person, and even setting the value of ActiveUsers to 1 is tracking other people around, is there a workaound to this different from this post? Select a specific skeleton - Unity / Orbbec Astra Pro
"Skeletonization": { "MaxDistance": 4000, "AutoTracking": true, "Type": "RegressionSkeletonization", "ActiveUsers": 1, "FeedbackThreshold": 0.1 },